
Hybrid brain-machine interfaces for natural neuroprosthetic control
Neuroprostheses rely on the use of brain-machine interfaces (BMI) to decode human motion intention {e.g., for reach and grasp motion from neural activity measured with implanted electrodes or non-invasively by electroencephalogram (EEG).
Notwithstanding advances in the field, several challenges need to be overcome for neuroprosthetic devices to be realistically used in practical applications. In particular, users should be able to control them in a reliable, intuitive manner and the prosthetic device should be operative for long periods of time without requiring long and repetitive calibration periods. This project focuses on tackling these challenges through the use of shared control for hybrid BMIs for the control of upper-limb neuroprostheses, in combination with semi-supervised learning.
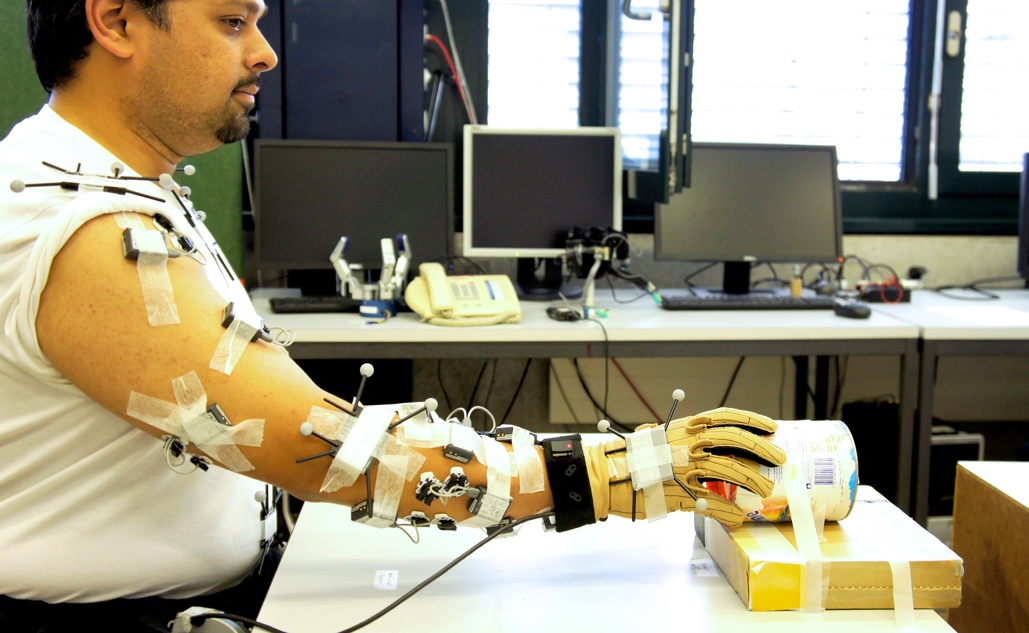
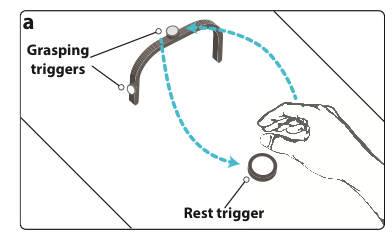
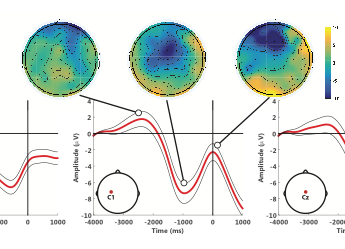
This project aims at improving the accuracy and timescale of prediction of reach and grasp motion by combining predictions from neural (EEG), and physiological (electromyography, EMG, and gaze tracking) signals. This approach will be complemented by shared-control strategies, in which the user provides high-level commands to the device, which translates them into low-level commands by means of added artificial intelligence and sensor fusion. We will advance the state of the art on shared control by incorporating advanced robot-learning approaches based on semi-supervised techniques.
Partners
Project funded by the Hasler foundation.
Selected publications
- Iwane, F., Halvagal, M., Iturrate, I., Batzianoulis, I., Chavarriaga, R., Billard, A. & Millán, J. d. R. Inferring subjective preferences on robot trajectories using EEG signals in 9th International IEEE EMBS Neural Engineering Conference (2019)